Hace tiempo decubrí que los sensores de los ratones ópticos son cámaras gracias a este artículo. Lo puse en la lista de cosas pendientes hasta hoy que he encontrado un rato para investigar. He abierto algunos ratones hechos polvo que tengo guardados y ninguno tiene sensor ADNS-2051, pero si el ADNS-5020 que funciona de forma parecida. Así que he cogido un Logitech LX3 y lo he destripado.

El ADNS-5020 es un sensor óptico que toma imágenes de 15 x 15 píxeles en blanco y negro, y es capaz de calcular el movimiento en los ejes X e Y a partir de ellas. Tiene un interfaz SPI, así que he usado un Arduino Nano para conectarme a él. Pero antes hay que hacer algunas modificaciones al circuito para aislar al sensor.
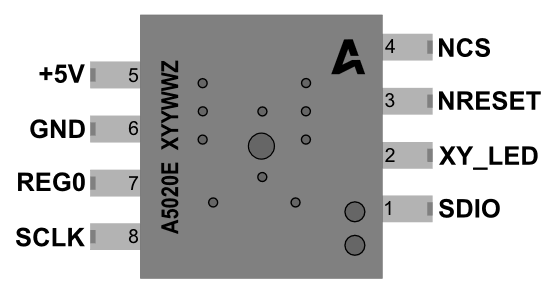
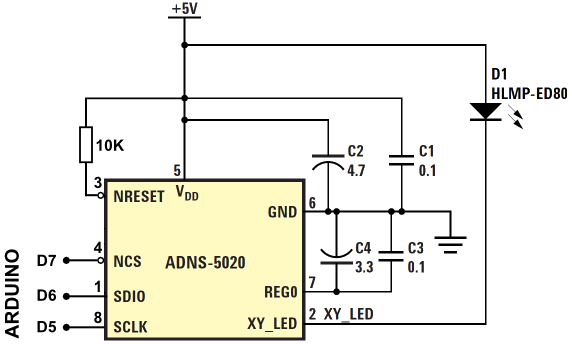
Para ello hay que o bien retirar el CY7C63813 y la resistencia R2 o cortar las pistas a estos componentes. También hay conectar una resistencia pull-up de 10k entre +5v y NRESET para mantener el ADNS-5020 encendido. Los pins D5, D6 y D7 del Arduino se conectan a SCLK, SDIO y NCS respectivamente. EL circuito resultante debe quedar algo así:
El software consta de dos parte. El sketch que conecta con el sensor y manda las imágenes:
#include
int SCLK = 5;
int SDIO = 6;
int NCS = 7;
void setup() {
Serial.begin(9600);
pinMode(SCLK, OUTPUT);
pinMode(SDIO, OUTPUT);
pinMode(NCS, OUTPUT);
mouse_reset();
delay(10);
}
void loop() {
char img[225];
for (int i=0;i<225;i++){
img[i]=readLoc(0x0b);
img[i] &= 0x7F;
img[i]+=1;
Serial.print(img[i], DEC);
Serial.print(",");
delay(2);
}
Serial.println();
delay(500);
}
void mouse_reset(){
// Initiate chip reset
digitalWrite(NCS, LOW);
pushbyte(0x3a);
pushbyte(0x5a);
digitalWrite(NCS, HIGH);
delay(10);
// Set 1000cpi resolution
digitalWrite(NCS, LOW);
pushbyte(0x0d);
pushbyte(0x01);
digitalWrite(NCS, HIGH);
}
unsigned int readLoc(uint8_t addr){
unsigned int ret=0;
digitalWrite(NCS, LOW);
pushbyte(addr);
ret=pullbyte();
digitalWrite(NCS, HIGH);
return(ret);
}
void pushbyte(uint8_t c){
pinMode(SDIO, OUTPUT);
for(unsigned int i=0x80;i;i=i>>1){
digitalWrite(SCLK, LOW);
digitalWrite(SDIO, c & i);
digitalWrite(SCLK, HIGH);
}
}
unsigned int pullbyte(){
unsigned int ret=0;
pinMode(SDIO, INPUT);
for(unsigned int i=0x80; i>0; i>>=1) {
digitalWrite(SCLK, LOW);
ret |= i*digitalRead(SDIO);
digitalWrite(SCLK, HIGH);
}
pinMode(SDIO, OUTPUT);
return(ret);
} Y el visor que recibe las imágenes por el puerto serie y las muestra en una ventana con PyQT5:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import sys, serial, threading
from PyQt5.QtWidgets import QApplication, QWidget, QLabel
from PyQt5.QtGui import QIcon, QPixmap
from PIL import Image, ImageDraw, ImageQt
class App(QWidget):
def __init__(self):
super().__init__()
self.title = 'PyQt5 Mousecam ADNS 5020'
self.left = 10
self.top = 10
self.width = 640
self.height = 480
self.initUI()
def initUI(self):
self.setWindowTitle(self.title)
self.setGeometry(self.left, self.top, self.width, self.height)
# Create widget
self.label = QLabel(self)
pixmap = QPixmap('fondo.jpg')
self.label.setPixmap(pixmap)
self.resize(pixmap.width(),pixmap.height())
self.show()
def mousecam(self):
moo = serial.Serial('/dev/ttyUSB0', 9600)
while True:
msg = moo.readline().decode()
print(msg)
img = list(map(int,msg.strip()[:-1].split(',')))
print(img)
im=Image.new('RGB', (15,15), None)
draw=ImageDraw.Draw(im)
for i, value in enumerate(img):
j = i // 15
i = i - j * 15
c = int(value * 2.4)
draw.point((i,j),(c,c,c))
im2 = im.resize((512,512))
qim = ImageQt.ImageQt(im2)
pix = QPixmap.fromImage(qim)
self.label.setPixmap(pix)
if __name__ == '__main__':
app = QApplication(sys.argv)
ex = App()
MouseCamThread = threading.Thread(target=ex.mousecam)
MouseCamThread.daemon = True
MouseCamThread.start()
sys.exit(app.exec_())Como resultado podemos ver las imágenes capturadas por el sensor. He probado con texto de 6 puntos y se diferencian las letras, pero seguro que puede hacerse algo con el contraste para que se vean mejor.
Existen sensores con mayor resolución y mejor fps para gaming como se puede ver en el catálogo del fabricante , es probable que con esos se consigan mejores resultados.
He subido el código y la documentación del sensor a un repositorio en Github por si alguien quiere experimentar y mejorar lo hecho hasta ahora.